System Architecture
This section documents the system-level architecture, data pathways, and design principles for the Low-Cost Smart Sensor Spoofer on UAV platform. The design emphasizes modularity, deterministic timing, and hardware abstraction to support both simulation-based validation and edge deployment.
High-Level Architecture Overview
The system is composed of three tightly-coupled subsystems that form a closed-loop digital thread:
Virtual sensing → Middleware → Edge inference → Telemetry feedback 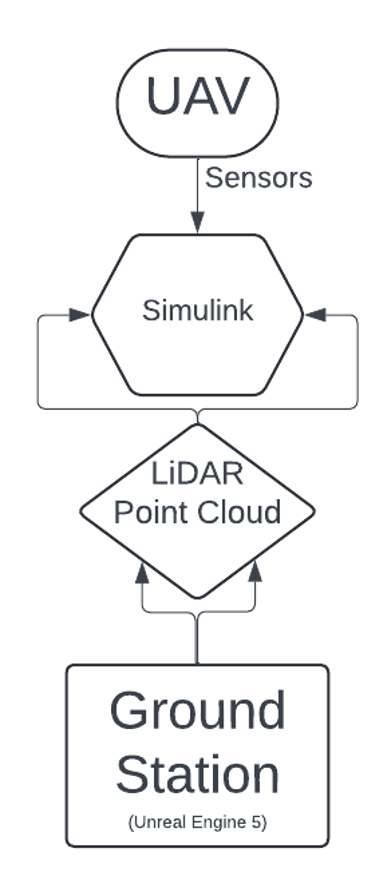
1. Ground Station — UE5 Virtual Environment
Role: Virtual sensor generator and operator control interface
Functions
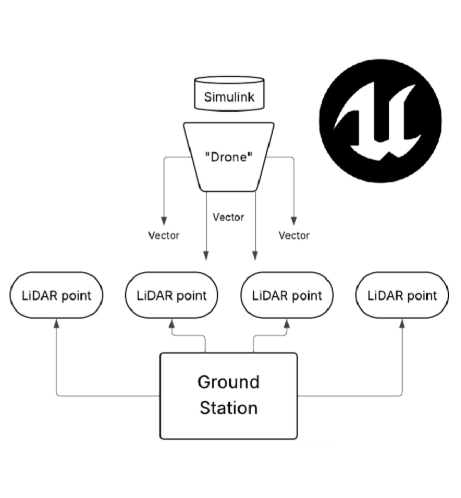
- Generates synthetic LiDAR point clouds using raycasting and scene geometry
- Injects configurable spoofing profiles (range shift, ghost targets, dropout)
- Streams time-tagged frames to Simulink over TCP
- Provides operator control for attack parameters and scenario selection
2. Simulink Bridge — Middleware & Timing Control
Role: System synchronization and protocol translation layer
Functions
- Validates incoming frames using CRC and sequence counters
- Enforces deterministic timing and buffering
- Converts virtual frames into sensor-accurate message formats
- Routes telemetry and inference results back to the GCS
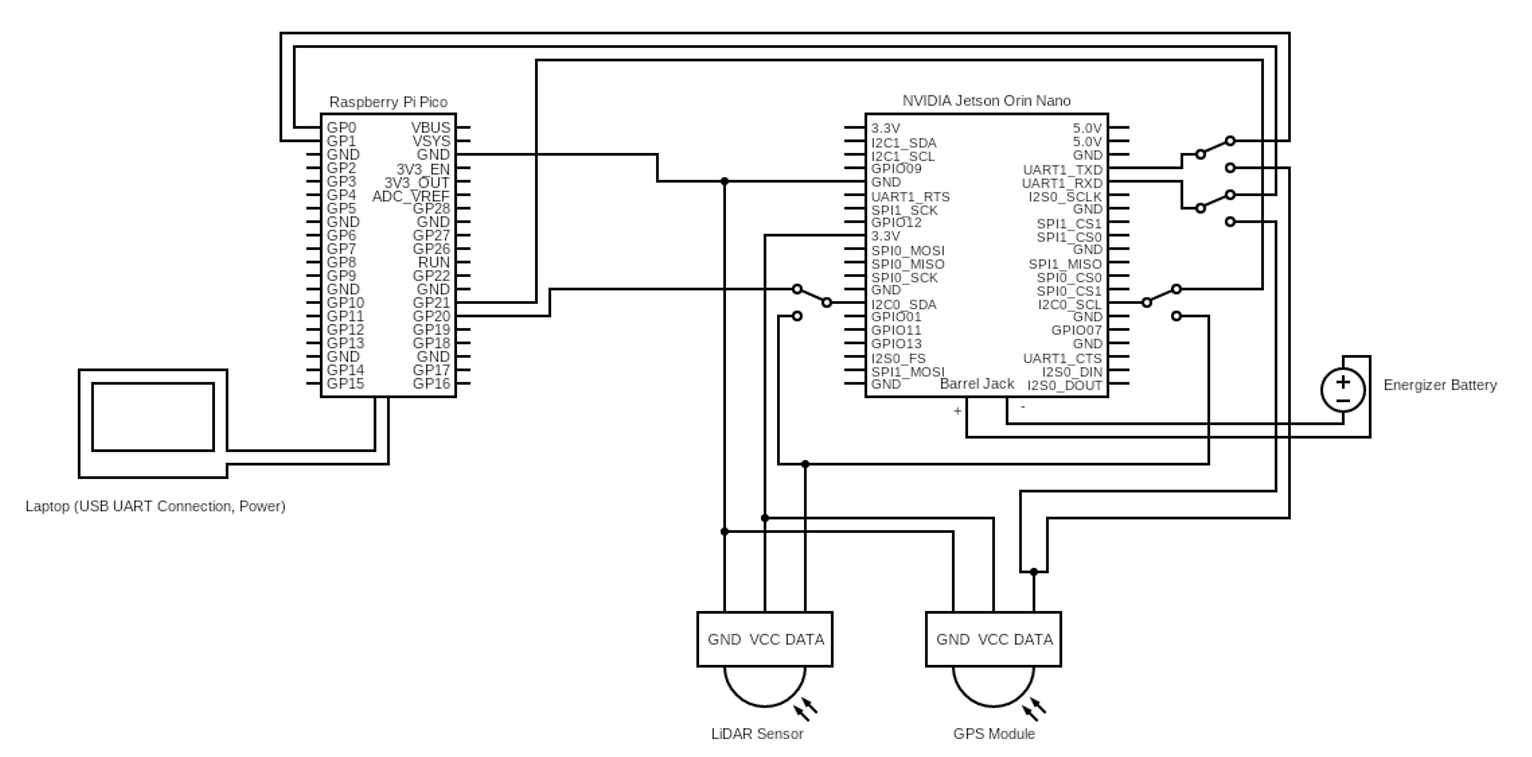
3. UAV Edge Device — Neural Inference & Sensor Emulation
Role: Real-time spoof detection and hardware abstraction
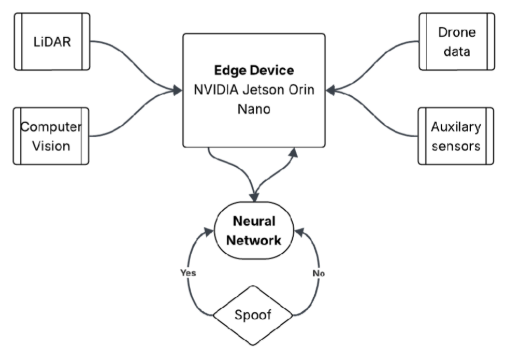
Hardware Stack
- Jetson Nano / Orin Nano — Edge AI inference
- Raspberry Pi / MCU HAL — Sensor bus emulation
- Livox LiDAR — Real-world signal validation
Functions
- Runs quantized neural network for spoof classification
- Emulates sensor buses (UART, I²C, SPI)
- Publishes telemetry, health, and confidence metrics
- Engages fallback logic under real-time constraint violations
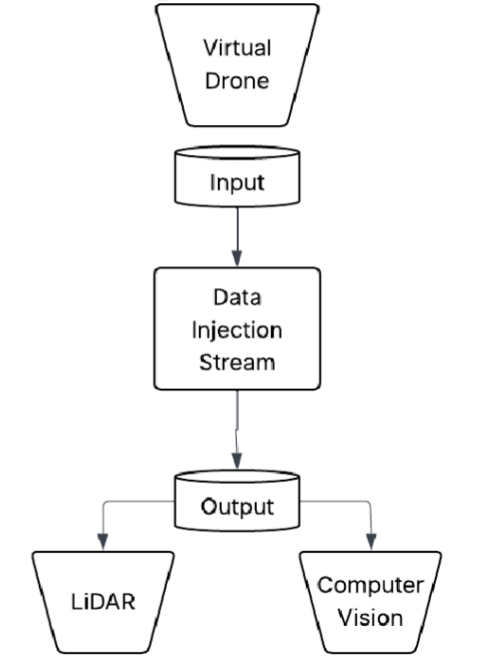
System Data Flow
UE5 Virtual LiDAR + Spoof Profiles → TCP (Frame + CRC + Timestamp) → Simulink Middleware → Sensor-Accurate Packets → Edge Device (Jetson + HAL) → Inference + Health Metrics → Telemetry Feedback → Ground Station
Data Characteristics
- Data Characteristics
- Frame-based point cloud transport
- Time-tagged packets with integrity verification
- Bounded queues for real-time determinism
Control Flow
Operator-in-the-Loop Execution Model
- Operator configures spoof parameters in the Ground Station
- Simulink synchronizes global timing and validates frames
- Edge device executes inference and decision logic
- Status, confidence, and system health are returned to the operator
Power Flow
| Subsystem | Power | Source | Regulation |
|---|---|---|---|
| Ground Station | AC | Mains | System PSU |
| Edge Device (Jetson) | 10,000mAh | Battery | 12V / 5V DC Rails |
| Livox LiDAR | Edge Device | DC Rail | 12V Regulated |
| HAL + MCU | Edge Device | DC Rail | 5V / 3.3V |
Design Principles
Deterministic Timing
Fixed-latency pipelines and bounded buffering to maintain real-time inference
Modular Validation
Each subsystem testable independently (UE5, Simulink, Edge)
Hardware Abstraction
Sensor protocols emulated via HAL to support rapid platform changes
Safety-First Spoof Isolation
Spoofing remains confined to simulation and HIL paths — no RF emissions
Traceability to Design Documents
This architecture aligns directly with:
- System Requirements Specification (SRS)
- Architecture Design Document (ADD)
- Verification & Validation Matrix (V&V)
Each subsystem maps to a formal Interface Control Document (ICD) defining message formats, timing constraints, and fault-handling behavior.
Architecture Summary
This design establishes a closed-loop digital twin framework that enables high-fidelity spoof simulation, real-time edge inference, and safe system validation without physical RF emission — supporting scalable UAV security research under academic and regulatory constraints.